Doctors prefer Pentagon's old health-records system to its new one
User satisfaction "increased minimally" last year for MHS Genesis, the electronic-records system installed under a 2015 contract, a GAO survey found.


Three firms will vie for Marines' $249M loitering-munitions buy
The Organic Precision Fires-Light contract aims to get the weapons to infantry units by 2027.


Space Force outlines vision for hybrid military-commercial-allied mission architectures
New strategy offers guidance on what the USSF wants to buy, but not how much it plans to spend.


New spy-satellite constellation begins launch next month
Seven operational satellites are planned this year, and more through 2028, a senior NRO leader said.
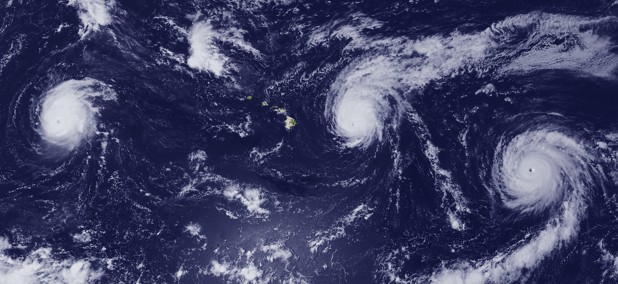
Drones, maps, and storm-tracking in the Pacific
The National Oceanic and Atmospheric Administration is working with partner nations in the Indo-Pacific to map the region as part of the Biden administration’s push for security.


The Navy wants to make info-warfare training ubiquitous
The plan is to open three new training centers and integrate nearly two dozen systems into the live, virtual, constructive training environment.


The Pentagon wants to help boost cybersecurity for small contractors
A new strategy outlines how the Defense Department plans to increase security and strengthen relationships across the industrial base.


Preparing for electronic warfare is the Army’s top cyber priority in 2024
Troops could have a backpack capability in the next six months—as long as Congress passes a budget.


Sprouts of promise bud in NATO’s tech incubator
Hopeful seedlings include improvements in energy resilience and storage.


Does TikTok need a new parent company? Senator mulls implications
The White House is pushing the Senate to pass a TikTok ban bill that swept through the House last week.


Today’s battles happen at the pace of software. The Pentagon needs to hit the accelerator
Experts tell lawmakers where the bottlenecks are.


Air Force’s T-7 trainer delayed another year
The service is also halving its planned buy of the advanced trainer in its 2025 budget request.


Can IT restore Congress’ trust in the Pentagon?
The Defense Department needs a better way to share budget data, a new report urges.


FBI: Prepare for an election year with fast-paced threats, powered by bad guys with AI
The technology could make the world’s best hackers even better.


Pentagon adds 'living inspection' to its cyber defenses
New assessment process adds automation, flexibility to threat detection, leaders say.


The Pentagon's connect-everything effort has a minimum viable product
An initial version of CJADC2 is “low latency and extremely reliable,” Deputy Defense Secretary Hicks said.


Biden to sign executive order boosting cybersecurity of ports, maritime vessels
The order empowers the Coast Guard to shore up cyber protections for maritime systems and harden current cyber incident reporting rules.


The Navy’s latest sea base is drone-ready
USS John L. Canley was designed to tackle a variety of missions, including special operations and counter-mine efforts.
Featured eBooks